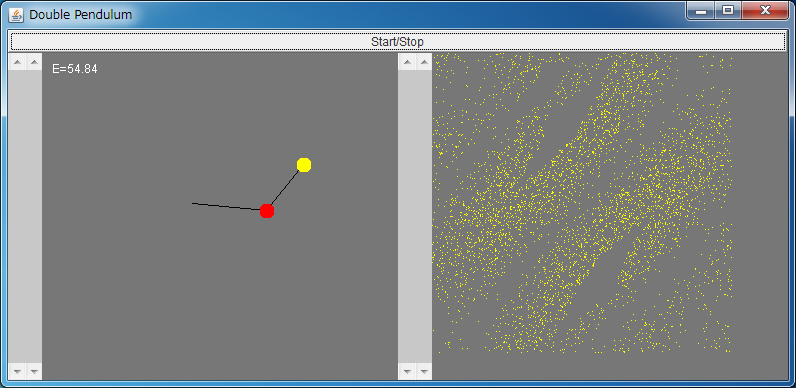
Double Pendulum
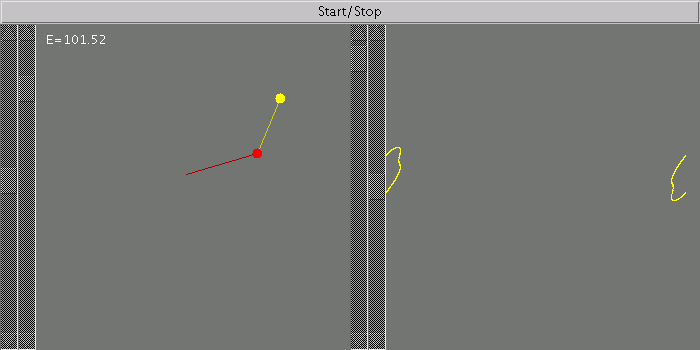
After downloading doublependulum.jar, please execute it by double-clicking, or typing "java -jar doublependulum.jar".
If the above application does not start, please install OpenJDK from adoptium.net.
 for a vector
for a vector  ,
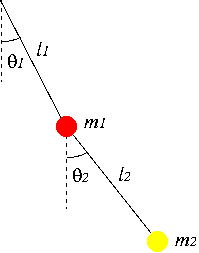
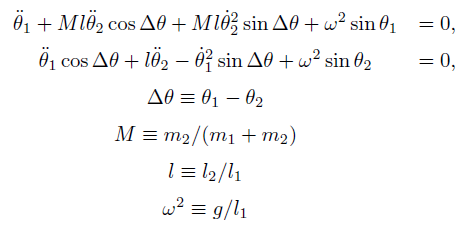
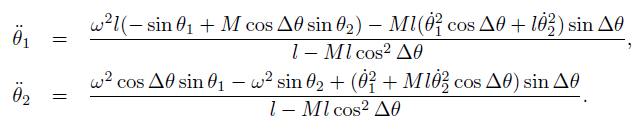
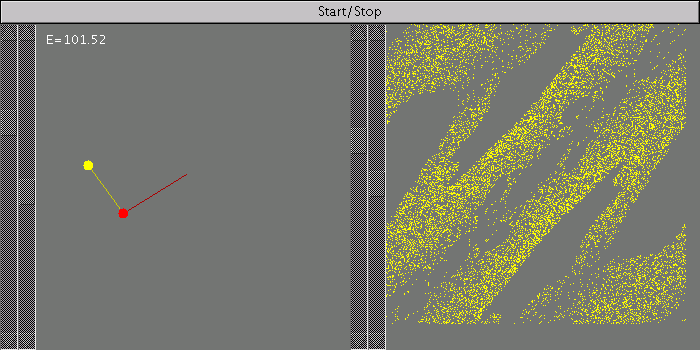
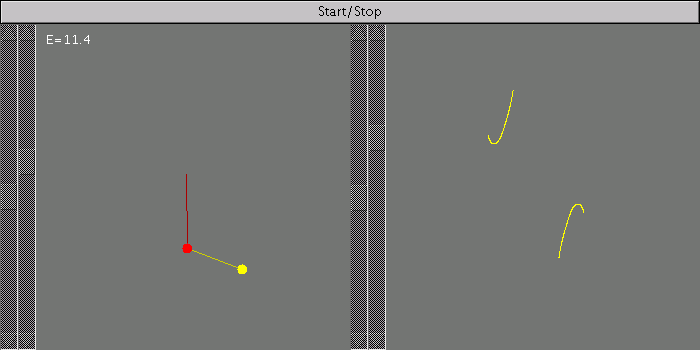
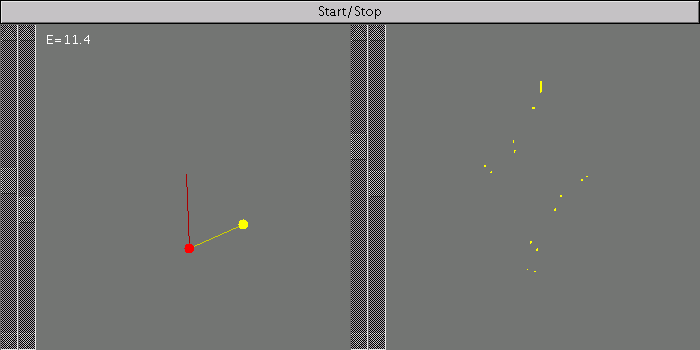
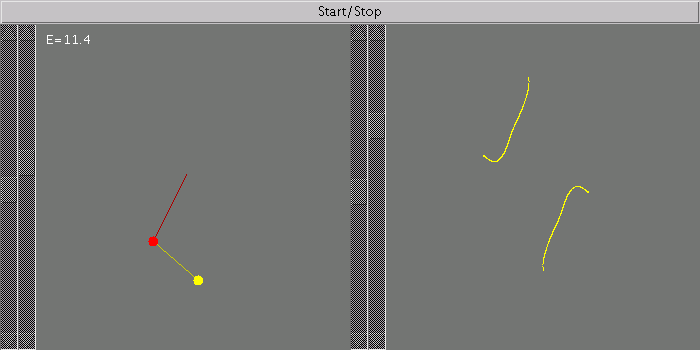
behaviors of a double pendulum can be analyzed.
,
behaviors of a double pendulum can be analyzed.
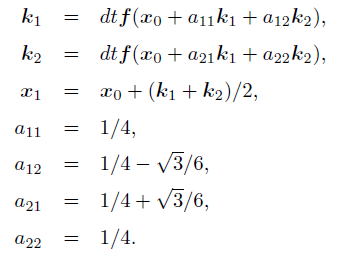
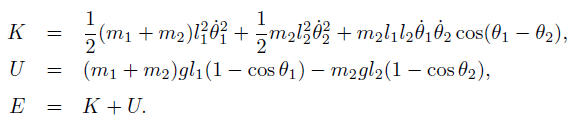
 where
where  is displayed.
is displayed.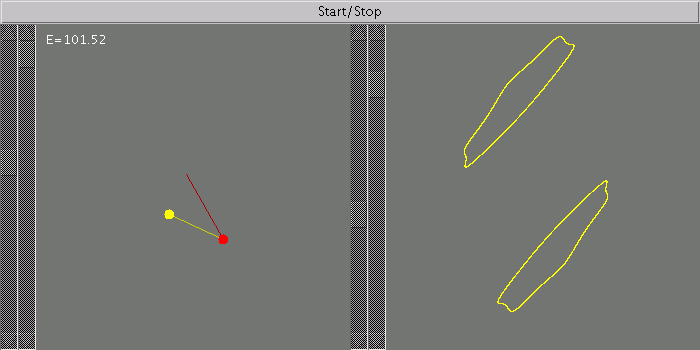{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}