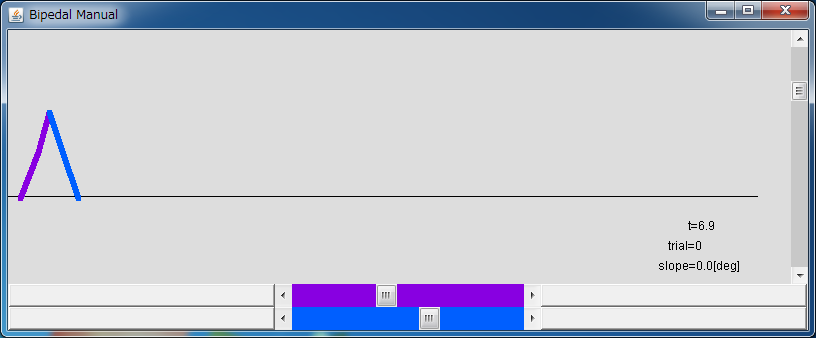
Manual Control of Bipedal Walking
After downloading bw_manual_app.jar, please execute it by double-clicking, or typing "java -jar bw_manual_app.jar".
To compare with "Reinforcement Learning for CPG-controlled Bipedal Walking",
let us try to control the identical model of bipedal walking manually.
You might understand its difficulty.
If the above application does not start, please install OpenJDK from adoptium.net.
[How to control]
- By double-clicking the blue or purple horizontal scroll bars, an initial horizontal velocity
is given to the model (only once).
- By moving the blue (right foot) or purple (left foot) horizontal scroll bars, you can change the destination angles of both feet.
By changing the destination angle of one foot, that of the other foot is determined automatically.
The model of biped walking (Taga, 1991) is
written by an equation of motion of 14 variables
 with 8 constraints.
with 8 constraints.
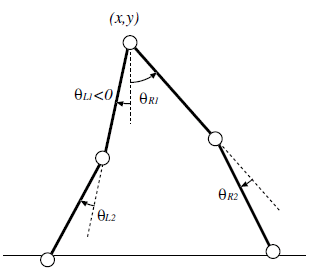
 The position of the model is indicated by
6 variables because 14 - 8 = 6,
and they are the position (x, y) of the hip, and
the angles of hips and knees
(θR1, θR2,
θL1, θL2) for both feet.
The position of the model is indicated by
6 variables because 14 - 8 = 6,
and they are the position (x, y) of the hip, and
the angles of hips and knees
(θR1, θR2,
θL1, θL2) for both feet.
Moreover, by considering their time-derivatives
(vx, vy) and
(ωR1, ωR2,
ωL1, ωL2),
the state of this dynamical system can be described.
 The torque T given to this model is determined by PD control scheme.
The torque T given to this model is determined by PD control scheme.
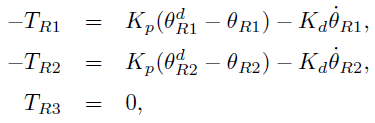 In this applet, the destination angles for both feet
θR1d and
θL1d can be changed with two horizontal
scroll bars.
In this applet, the destination angles for both feet
θR1d and
θL1d can be changed with two horizontal
scroll bars.
θR2d and
θL2d are
determined automatically so that θR2d=55
when θR1d > 0 and ωR1d > 0 are satisfied, and otherwise
θR2d=0.
This page is based on the following paper.
- G. Taga, Y. Yamaguchi, and H. Shimizu,
"Self-organized control of bipedal locomotion by neural oscillators in unpredictable environment"
Biological Cybernetics, vol. 65, pp.147-159 (1991).
<< Reinforcement Learning for CPG-controlled Bipedal Walking
/
Cart-Pole Balancing by Reinforcement Learning >>
Back to Takashi Kanamaru's Web Page